Towards Automatic Adaption for Object Detection by Interactive Perception
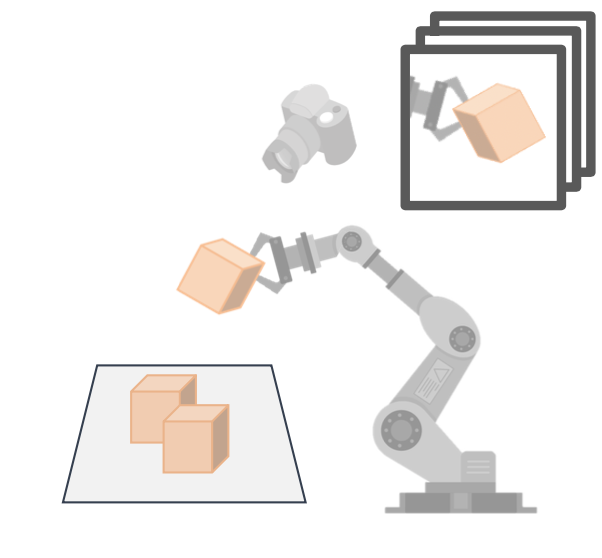
In many applications, object detection is a crucial component of visual perception that identifies objects for downstream algorithms. However, even a slight change in manufacturing system might require expensive data recollection and human annotation processes to re-train the model. Therefore, we assume a well-developed object detector in industrial paradigms, which should be capable of quick adaptation to unseen objects without costly human intervention. Existing approaches such as semi-supervised and few-shot methods either still rely on numerous human annotations or cannot achieve reliable performance. In this work, we propose a novel paradigm of object detection by interactive perception (ODIP), where an object detector gradually learns to recognize unseen objects by interacting with a grasping system that can automatically collect required data and annotations. The proposed ODIP shows promising results and outperforms both the standard fine-tuning approach and state-of-the-art few-shot method. We also provide the demo video to further illustrate the training process and potential application of ODIP.